


In the realm of modern agriculture, the integration of cutting-edge technologies is revolutionizing the way we approach sustainable farming practices. A recent study published in Advances in Modern Agriculture titled "Classification of cotton water stress using convolutional neural networks and UAV-based RGB imagery" has garnered significant attention for its innovative approach to precision irrigation management. Conducted by researchers from Institute of Data Science and the AgriLife Research and Extension Center of Texas A&M University (authors's information is below). This study introduces a novel method for classifying cotton water stress using unmanned aerial vehicles (UAVs) and convolutional neural networks (CNNs), offering a powerful solution for optimizing water use in agriculture.
Research Background and Significance Cotton, a cornerstone of the global textile industry, faces significant challenges due to water scarcity. Efficient irrigation management is crucial for sustainable cotton production, especially in regions like the Texas High Plains, where water resources are limited. Traditional methods of assessing crop water stress often rely on complex calculations and extensive data inputs, which can be time-consuming and prone to inaccuracies. This study leverages the power of UAVs and deep learning to provide a more precise and efficient alternative.
Methods and Experimental Design The research was conducted at the USDA-ARS Cropping Systems Research Laboratory in Lubbock, Texas. The cotton field was divided into 12 drip irrigation zones, with four different irrigation treatments applied: rainfed, full irrigation, percent deficit of full irrigation, and time delay of full irrigation. High-resolution RGB images were captured using a DJI Phantom 4 RTK UAV, and a CNN model was developed to classify cotton water stress based on these images.
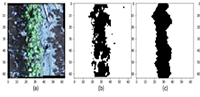
Key Findings and Innovations The study achieved remarkable results, with the CNN model demonstrating an overall prediction accuracy of approximately 91% in classifying cotton water stress. By segmenting the images into canopy and soil areas using morphological image processing, the researchers were able to analyze the individual contributions of these components to water stress. Additionally, a random forest classifier was employed to identify the most important image features for accurate classification, providing valuable insights into the physiological indicators of water stress in cotton plants. This research represents a significant leap forward in precision agriculture, showcasing the potential of UAVs and deep learning technologies to enhance irrigation management and promote sustainable farming practices.
This groundbreaking study not only demonstrates the potential of UAVs and CNNs in modern agriculture but also provides a practical tool for cotton growers to optimize water use and improve crop yields. By harnessing the power of advanced technologies, researchers are paving the way for a more sustainable and efficient future in agriculture.
Citation Information: Niu H, Landivar J, Duffield N. Classification of cotton water stress using convolutional neural networks and UAV-based RGB imagery. Advances in Modern Agriculture, 2024; 5(1): 2457. https://doi.org/10.54517/ama.v5i1.2457
Authors’ introduction:
Director, Texas A&M Institute of Data Science, USA Google Scholar H-index 71 Scopus H-index 52 Web of Science H-index 37 Research Interests: data and network science, particularly applications of probability, statistics, algorithms and machine learning to the acquisition, management and analysis of large datasets
Director, Texas A&M AgriLife Research, USA Google Scholar H-index 18 Scopus H-index 19 Web of Science H-index 10 Research Interests: digital agriculture; cropping systems
Research Engineer, Texas A&M Institute of Data Science, USA Google Scholar H-index 14 Scopus H-index 12 Web of Science H-index 12 Research Interests: machine learning; computer vision; robotics
|



Prof. Zhengjun Qiu
Zhejiang University, China

Cheng Sun
Academician of World Academy of Productivity Science; Executive Chairman, World Confederation of Productivity Science China Chapter, China
Indexing & Archiving

.jpg)
.jpg)

.jpg)


In the realm of modern agriculture, the integration of cutting-edge technologies is revolutionizing the way we approach sustainable farming practices. A recent study published in Advances in Modern Agriculture titled "Classification of cotton water stress using convolutional neural networks and UAV-based RGB imagery" has garnered significant attention for its innovative approach to precision irrigation management. Conducted by researchers from Institute of Data Science and the AgriLife Research and Extension Center of Texas A&M University (authors's information is below). This study introduces a novel method for classifying cotton water stress using unmanned aerial vehicles (UAVs) and convolutional neural networks (CNNs), offering a powerful solution for optimizing water use in agriculture.
Modern agricultural technology is evolving rapidly, with scientists collaborating with leading agricultural enterprises to develop intelligent management practices. These practices utilize advanced systems that provide tailored fertilization and treatment options for large-scale land management.
This journal values human initiative and intelligence, and the employment of AI technologies to write papers that replace the human mind is expressly prohibited. When there is a suspicious submission that uses AI tools to quickly piece together and generate research results, the editorial board of the journal will reject the article, and all journals under the publisher's umbrella will prohibit all authors from submitting their articles.
Readers and authors are asked to exercise caution and strictly adhere to the journal's policy regarding the usage of Artificial Intelligence Generated Content (AIGC) tools.
Asia Pacific Academy of Science Pte. Ltd. (APACSCI) specializes in international journal publishing. APACSCI adopts the open access publishing model and provides an important communication bridge for academic groups whose interest fields include engineering, technology, medicine, computer, mathematics, agriculture and forestry, and environment.